|
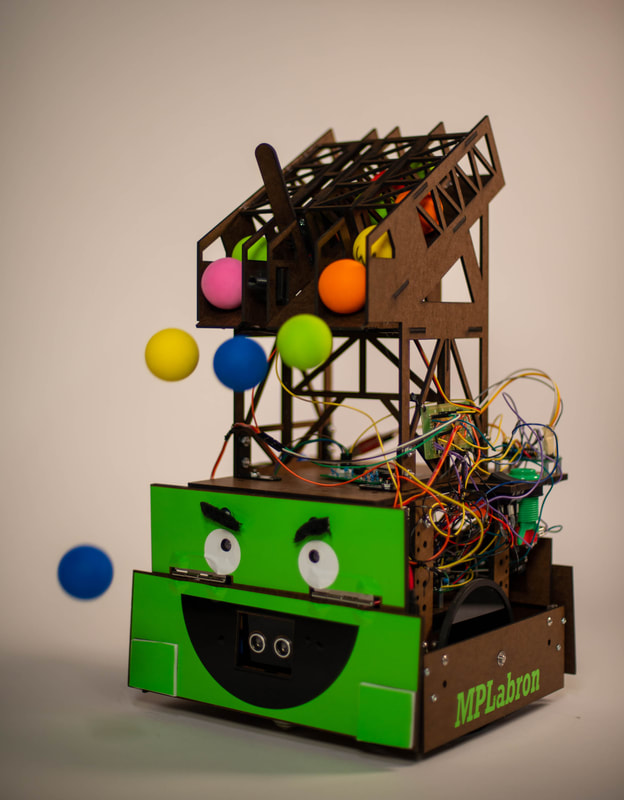
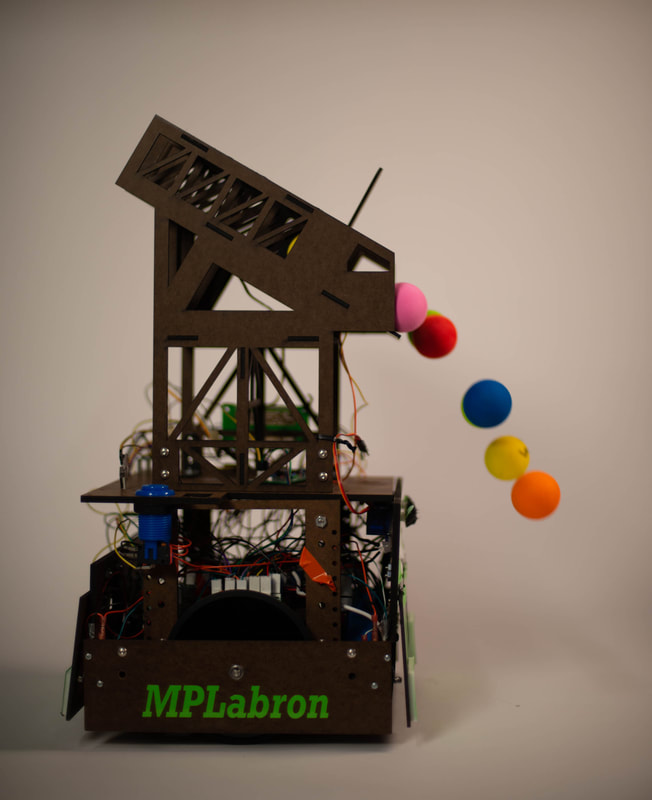
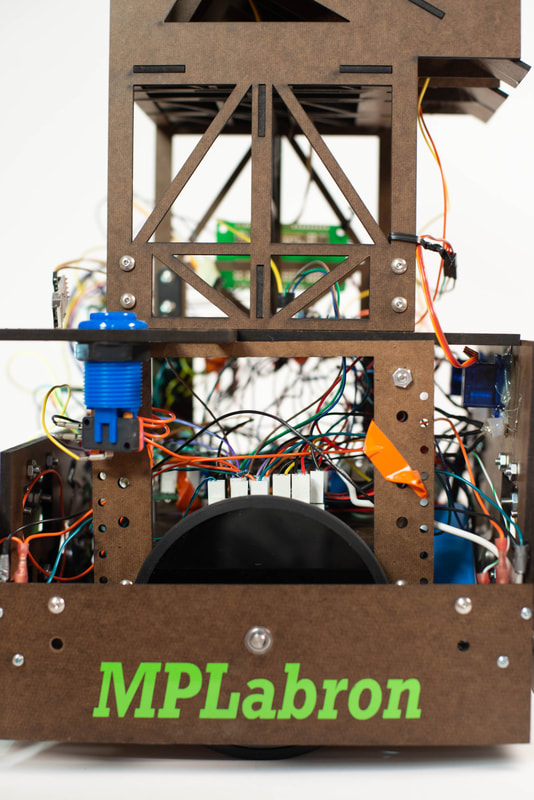
MPLabron James was built to compete in the Winter '22 ME218 robot tournament. This year's game allowed teams to score points either by "shooting hoops" into a basket or by driving up to the basket and "dunking." Our robot was ruthlessly optimized for dunking, so we named it after LeBron (one of the best dunkers of all time) and after MPLabX (one of the best* IDE's of all time).
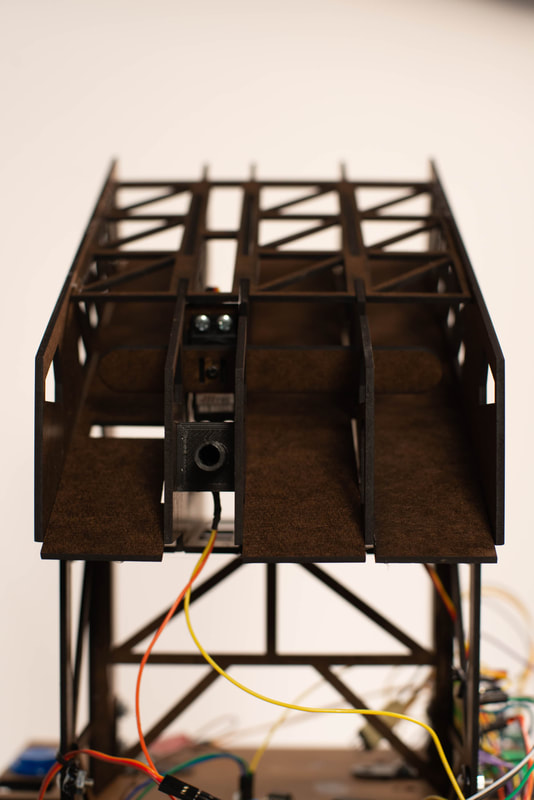
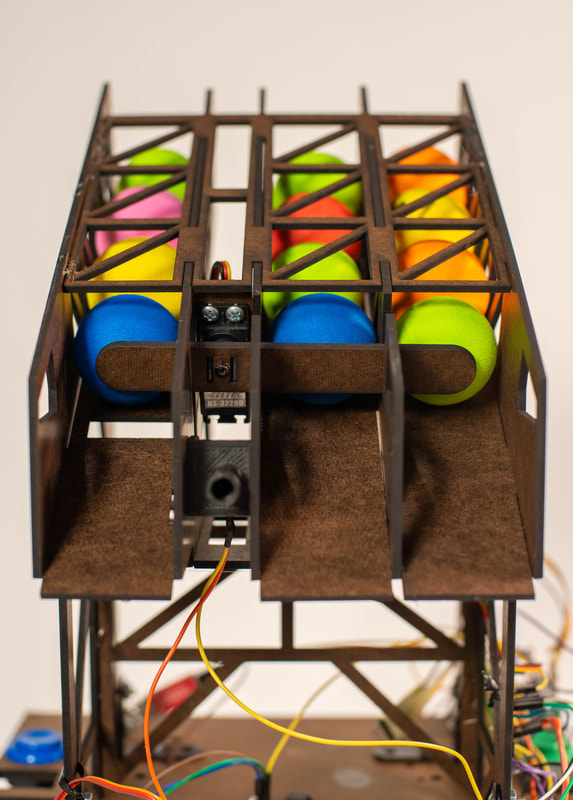
Our strategy was to dunk as many balls as possible as often as possible. We took advantage of a rule that forbids loading more than 3 balls at a time, but does not forbid carrying more than 3 balls at a time. MPLabron drives outside of the "reloading zone," drives back in, receives 3 balls, and repeats until he holds his full capacity of 12 balls, at which point he drives to the basket and dunks them all. We gave him large wheels to let him drive quickly and used motor encoders to ensure he drives straight. MPLabron had a 1-1 record in tournament/grudge-match play, with an average final score of 39 points. |
Gallery
   |
Disclaimer: Unfortunately, the ME218b tournament Zoom recording was not saved and is unavailable to the team.
The video on the left shows MPLabron James in action on game day!
The video on the right shows an almost finished version of MPLabron. After this state the wheel PID control was retuned to account for overshoot, and the augmented dunker was added. The overall strategy is shown however, loading several balls before dunking.
The video on the left shows MPLabron James in action on game day!
The video on the right shows an almost finished version of MPLabron. After this state the wheel PID control was retuned to account for overshoot, and the augmented dunker was added. The overall strategy is shown however, loading several balls before dunking.
|
|
|
*If by best you mean worst.
|
Kathy Huang
Richard Randall Ben Choi Paula Stocco |
